Giới thiệu
Trong một trong những dự án trước đây của chúng tôi, chúng tôi đã chỉ cho bạn cách tạo rô-bốt di động được điều khiển bằng cử chỉ bằng cách sử dụng tiện ích mở rộng Machine Learning của PictoBlox. Trong dự án này, chúng tôi sẽ hướng dẫn bạn cách điều khiển Robot Arduino Uno dẫn động 2 bánh bằng cử chỉ tay bằng tiện ích mở rộng Machine Learning.
Sẵn sàng? Bộ. AI!
Điều kiện tiên quyết để chế tạo Robot điều khiển bằng cử chỉ
Bạn sẽ cần những thứ sau để tạo ra robot điều khiển bằng cử chỉ:
- Robot Arduino Robot dẫn động 2 bánh/4 bánh.
- Máy tính xách tay hoặc máy tính có camera
- Phiên bản mới nhất của PictoBlox
- Một kết nối Internet tốt.
Để chế tạo robot Arduino Uno dẫn động 4 bánh các bạn truy cập link tại đây để biết cách nhé.
Đào tạo người mẫu.
Để làm việc với Machine Learning, trước tiên chúng tôi cần huấn luyện các mô hình của mình cách nhận biết các cử chỉ từ sân khấu, tức là nguồn cấp dữ liệu máy ảnh của chúng tôi.
- Truy cập https://teachablemachine.withgoogle.com/ để đào tạo mô hình.
- Nhấp vào nút Bắt đầu . Một trang mới sẽ mở ra.
- Chọn ô Dự án hình ảnh vì chúng tôi sẽ đào tạo mô hình bằng hình ảnh về cử chỉ tay của chúng tôi.
- Hãy thêm lớp đầu tiên. Bạn lưu trữ hình ảnh mẫu của mình vào các lớp bằng cách sử dụng webcam hoặc bằng cách tải nó lên. Trong trường hợp này, chúng tôi sẽ thêm hình ảnh mẫu bằng Webcam, do đó hãy nhấp vào nút Webcam để khởi động máy ảnh.
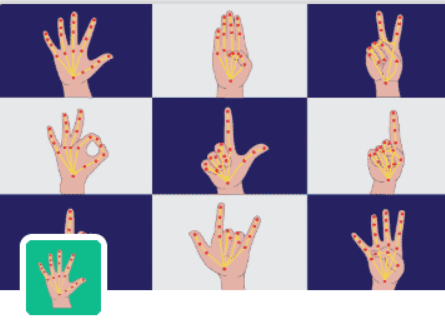
- Đầu tiên chúng ta sẽ tạo lớp cho robot di chuyển về phía trước, do đó, hãy mở lòng bàn tay và nhấp vào Giữ để ghi để ghi lại hình ảnh.
- Chúng ta sẽ thực hiện bốn lớp:
- Thẳng: Robot sẽ di chuyển về phía trước nếu chúng ta giữ thẳng lòng bàn tay.

- Bên trái: Nó sẽ rẽ trái Nếu chúng ta nghiêng tay sang trái.
- Đúng: Nó sẽ rẽ phải Nếu chúng ta nghiêng tay sang phải.
- Dừng lại: Robot sẽ dừng lại nếu chúng ta nắm tay lại.

- Tương tự, tạo ba lớp còn lại.
Với điều này, bạn đã nhập hình ảnh mẫu để huấn luyện dữ liệu. Bây giờ chúng ta sẽ đào tạo mô hình.
Đào tạo người mẫu
- Nhấp vào nút Mô hình tàu hỏa và đợi mô hình được huấn luyện.
- Bạn có thể xem/kiểm tra mô hình được đào tạo.
Xuất mô hình đã đào tạo
Bây giờ, mô hình đã hoàn hảo, hãy xuất mô hình.
- Nhấp vào nút Xuất mô hình .

Một cửa sổ bật lên sẽ mở ra. Nhấp vào nút Tải lên mô hình của tôi .

Một liên kết có thể chia sẻ sẽ xuất hiện, Sao chép nó.

Tải lên chương trình cơ sở
- Mở PictoBlox.
- Nhấp vào nút bảng và chọn Arduino Uno .
- Trước khi làm việc với Arduino, hãy tải firmware lên nó.
- Kết nối Arduino Uno của bạn với máy tính bằng cáp USB.
- Chọn cổng nối tiếp thích hợp. Nhấp vào nút Tải lên chương trình cơ sở .
- Sau khi tải lên, hãy ngắt kết nối cáp USB.
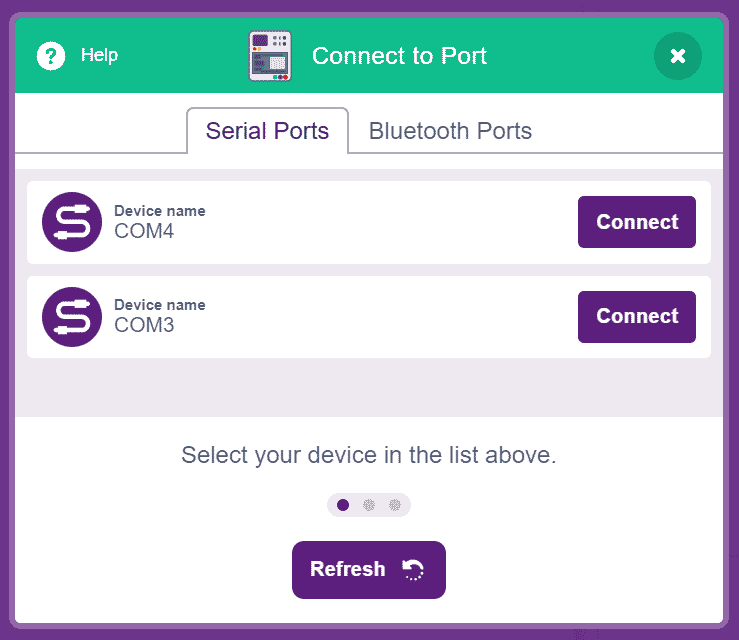
- Tiếp theo, chúng ta cần kết nối robot Arduino Uno bằng Bluetooth.
- Do đó, hãy nhấp vào nút Kết nối , nhấp tiếp theo vào Cổng Bluetooth và chọn cổng Bluetooth thích hợp.

Viết kịch bản
Bây giờ các mô hình đã được tải. Hãy bắt đầu bằng cách viết kịch bản.
Thiết lập dự án
- Trước tiên, chúng tôi sẽ thêm Tiện ích mở rộng học máy.
- Để làm việc với tiện ích mở rộng AI và ML hoàn toàn mới, bạn cần lưu ý hai điều:
- Rằng bạn phải đăng nhập / đăng nhập vào PictoBlox từ đây.
- Bạn phải có kết nối internet tốt.
- Nhấp vào nút Thêm tiện ích mở rộng và chọn tiện ích mở rộng Machine Learning .

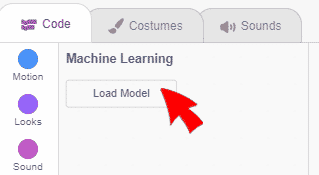
Nhấp vào nút Tải mô hình .
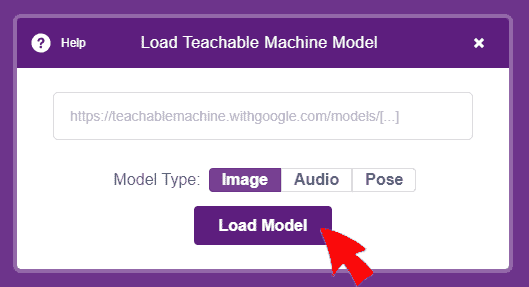
Một cửa sổ bật lên sẽ mở ra. Dán liên kết mà bạn đã sao chép từ máy có thể dạy được và nhấp vào nút Tải mô hình.
Bây giờ bạn có thể thấy các khối Machine Learning đã được tải.
Thiết lập sân khấu
- Đầu tiên, kéo và thả khối mũ khi cờ được nhấp vào từ bảng Sự kiện để thực thi chương trình khi nhấp vào cờ xanh.
- Vì chúng ta cần nhận dạng cử chỉ tay từ nguồn cấp dữ liệu máy ảnh, hãy đặt video quay () lên sân khấu với khối trong suốt bằng 0 từ bảng Machine Learning .

- Tiếp theo, chụp kết nối khối động cơ () hướng 1 () hướng 2 () & khối xung lực (). Chọn 1 từ danh sách thả xuống đầu tiên, 6, 5 và 3 từ danh sách thả xuống thứ hai, thứ ba và thứ tư tương ứng
- Nhân đôi khối này và chọn 2, 9, 10 và 11 từ danh sách thả xuống thứ nhất, thứ hai, thứ ba và thứ tư tương ứng.
- Đặt khối mãi mãi để mã chạy liên tục.

Chỉ định hành động
Tiếp theo, chúng ta sẽ nhận biết các cử chỉ từ sân khấu và thực hiện hành động tương ứng.
Vì vậy, hãy tạo một vài khối chức năng tùy chỉnh.
- Đi tới bảng Khối của tôi .
- Nhấp vào nút Tạo khối .
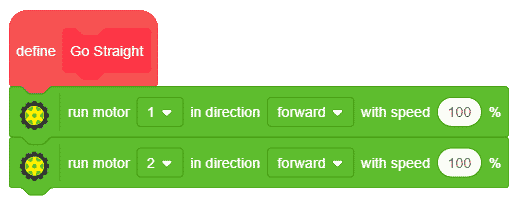
- Đầu tiên chúng ta sẽ thực hiện chức năng làm cho robot di chuyển về phía trước. Vì vậy, hãy viết thẳng vào tên và nhấp vào OK.
- Bạn sẽ thấy một khối mũ trên khu vực viết kịch bản. Đặt động cơ đang chạy () theo hướng () với khối tốc độ () % từ khối bộ truyền động .
- Nhân đôi khối trên và đặt nó bên dưới nó và chọn 2 từ danh sách thả xuống đầu tiên.
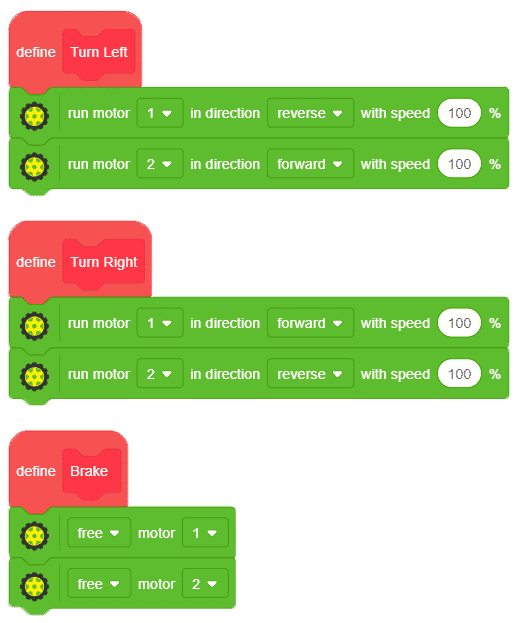
- Tương tự, chúng ta sẽ tạo lần lượt các khối tùy chỉnh Rẽ trái, Rẽ phải và Phanh .
- Nhân đôi hai khối động cơ và đặt chúng bên dưới các khối tùy chỉnh Turn Left và Turn Right.
- Hãy thực hiện một vài thay đổi đối với các khối này.
- Vào khối Rẽ trái, chọn đảo ngược từ danh sách thả xuống thứ hai của khối đầu tiên.
- Vào khối Turn Right, chọn đảo ngược từ danh sách thả xuống thứ hai của khối thứ hai.
- Vào khối Phanh, kéo và thả khối động cơ tự do 1 từ bảng bộ truyền động. Nhân đôi nó và chọn 2 từ khối thứ hai.
Hoàn thiện kịch bản chính
Bây giờ, hãy chuyển sang kịch bản chính.
- Đặt khối if-else từ bảng điều khiển bên dưới khối con trỏ đã đặt.
- Kéo và thả khối được xác định từ () là () từ bảng máy học và chọn giai đoạn từ trình đơn thả xuống và chuyển tiếp từ trình đơn thả xuống thứ hai. Điều này sẽ cho phép chúng tôi nhận ra lớp chuyển tiếp từ mô hình được đào tạo.

- Đặt khối đi thẳng vào cánh tay if.
- Nhân đôi khối if và đặt nó vào nhánh else

Chọn bên trái từ khối if và thay thế khối đi thẳng bằng khối rẽ trái.
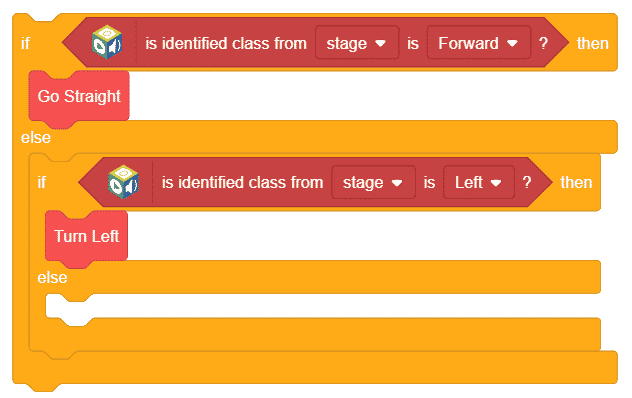
Lặp lại quá trình tương tự cho bên phải và dừng lại.

Kịch bản hiện đã hoàn tất, nhấp vào cờ xanh để chạy kịch bản.
Phần kết luận
Với điều này, robot Arduino Uno được điều khiển bằng cử chỉ AI của bạn đã sẵn sàng khuấy động. Thưởng thức!
Tải xuống dự án – Mã và tệp
| Nhãn mã | Tệp mã |
|---|---|
| Mã PictoBlox của Arduino Robot được điều khiển bằng cử chỉ | https://ai.thestempedia.com/wp-content/uploads/2023/05/Gesture-Controlled-Arduino-Robot-2.sb3 |

{kind=link}